
In-Space Telescope Assembly Robotics (ISTAR)
Researchers:
Kristina Hogstrom
Nicolas Lee
Sergio Pellegrino
Description
The future of astronomy may rely on extremely large space telescopes in order to image Earth-sized exoplanets or study the first stars. These telescopes will not be possible without a radical shift in design methods and concepts that are not limited by the capacity of a single launch vehicle. The ISTAR project is developing a feasible concept for an optical space telescope with a collecting area of nearly 8000 square meters, launched in pieces from the ground, and assembled by highly dexterous robots in space.
Current work is focused on the design and feasibility analysis of the telescope structure, as it has to be stiff and precise enough to maintain optical tolerances while also being amenable to robotic operations. The overall optical scheme of the telescope includes four main elements: a segmented spherical primary mirror roughly hexagonal in shape spanning 100 meters from side to side; an eyepiece containing all subsequent mirrors and detectors; a metrology system; and a sun shade.
Primary Mirror Assembly Concept
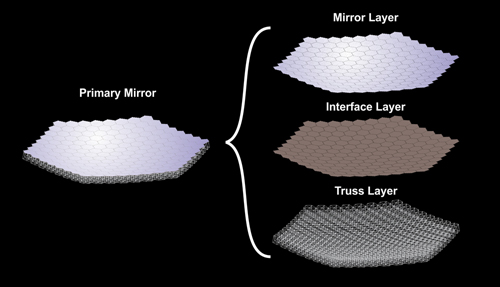
The primary mirror consists of thousands of deformable mirror segments. Our concept for assembling these mirror segments builds upon the idea of a deployable module. The mirror as a whole is composed of three layers: the mirror segment layer, the interface layer consisting of Stewart platforms and other actuators, and the truss layer that provides the stiffness to maintain the overall mirror geometry. The truss design uses both robotic assembly and deployable structures to reduce assembly time, featuring expanding truss modules grouped with pre-assembled clusters of mirror segments that are connected together in space.
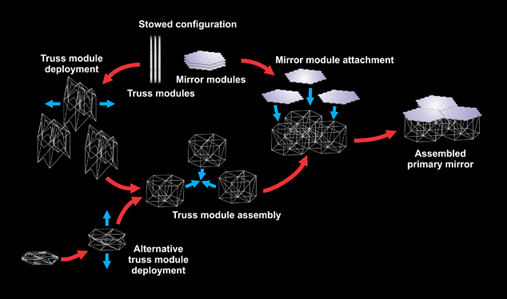
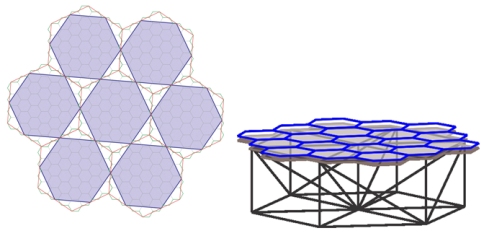
With this scheme, the truss module face dimension is parameterized by the number of mirror segments in a single pre-assembled cluster. The truss modules are connected from edge to edge rather than face to face, to reduce the number of redundant members in the truss. This configuration allows identical mirror clusters and interface elements to be closely spaced, maintaining a filled mirror surface.
The geometry of the structure was chosen from a vast design space, which was first narrowed using "back-of-the-envelope" analytical methods to satisfy vibrational stiffness and mass requirements. Finite element analysis is used to demonstrate that the structure satisfies optical precision requirements while subjected to loads typically encountered in the space environment.
Publications:
- Hogstrom, K., Backes, P., Burdick, J., Kennedy, B., Kim, J., Lee, N., Malakhova, G., Mukherjee, R., Pellegrino, S., Wu, Y.-H. (2014), A robotically-assembled 100-meter space telescope, International Astronautical Congress, 29 September to 3 October 2014, Toronto, Canada.
