
Sensing and Control of Active Primary Mirror Segments
Researchers
Kathryn Jackson
Sergio Pellegrino
Description
Segmented primary mirrors are the solution to constructing large aperture telescopes both on the ground and in space. These segments must be precisely shaped and positioned such that they follow the curve of a single monolithic surface. The control can be divided into two primarysubsets: Shaping flexible active mirror segments, and co-phasing, which is the use of rigid-body actuation for the positioning of correctly shaped segments, whether they are rigid or active mirrors. Both require closed-loop feedback control and some form of wavefront sensing to minimize errors.
Active flexible mirror segment control:
In the context of a telescope primary mirror, active flexible segments can be nominally spherical in their resting position, and must be driven to the shape required by their position within the primary mirror. We are currently using both Reverse Hartmann, also known as Projected Hartmann, and Shack-Hartmann wavefront sensing to determine the surface figure of the segments. These are coupled with a constrained linear least squares fit to compute mirror actuator commands from wavefront sensor slope measurements, and a simple proportional integral feedback controller. For more information on these wavefront sensing techniques, see “link to thin active mirrors section”.
Co-Phasing:
The difference between a science image from a phased and un-phased segmented primary mirror is significant in terms of image quality. This difference is induced by destructive interference caused by tip, tilt and piston errors in the segments. Co-phasing aims to reduce these errors to λ/10 or better; in the visible wavelengths, this is on the order of 50nm.

The challenge posed for this research is to implement a co-phasing process that introduces minimal computational complexity and few alterations to any existing optical design. This is in contrast to existing co-phasing methods, which require precise translation of the focal plane detector, and computationally intensive minimization algorithms.
The proposed solution is the Zernike Wavefront Sensor (ZWFS), which uses the principle of phase contrast, introduced to the field of microscopy by Frits Zernike in the 1930s, and later adapted for wavefront sensing in telescopes. We propose to implement a high dynamic range version of the original static phase contrast plate, which will allow us to sense several microns of error in the position of each mirror segment. Phase contrast plates are either a reflective or transparent optic, placed at the focal plane of an optical system with a central feature, roughly the size of the airy disc. This feature induces a known optical path difference (OPD) between the centre of the diffraction pattern and the rest of the image. The result, once the light has propagated to the pupil conjugate plane, is a change in intensity directly related to the position of the primary mirror segment. A simulation of an initial pupil configuration with piston, tip and tilt errors coupled with an OPD added at the focal plane, shows the type of characteristic intensity patterns this can induce at the pupil imager.

Changing the length of the OPD induced by the phase contrast plate causes the intensity of the pupil image to modulate, providing information on the magnitude and sign of the primary mirror segment position errors. The proposed design for this high dynamic range version, so called Long Stroke ZWFS, is a narrow staircase with half the steps below and half the steps above the plane of the substrate.

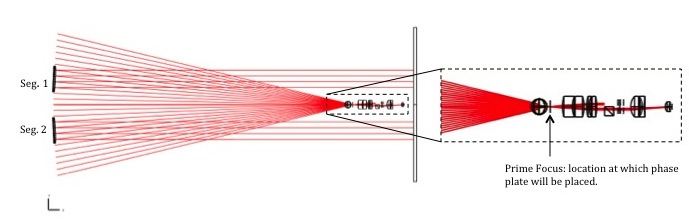
The co-phasing method will be tested on the AAReST optical testbed (see “link the AAReST section”) and will be positioned within the system at the telescope prime focus. Initially, it will be tested with the two rigid reference mirrors, with a future experiment planned to phase the two deformable mirrors.
Funding:
Funding for this project has been provided by DARPA.
